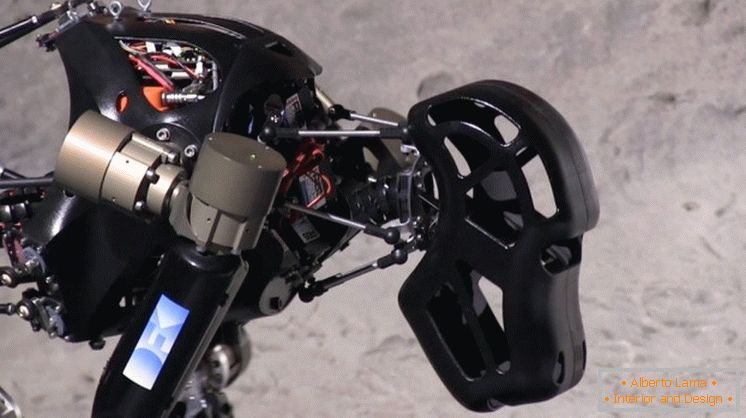
Německé výzkumné centrum pro umělou inteligenci (DFKI) a univerzita v Brémách pracují na simianovém robotovi iStruct Demonstrator, je klasifikován jako "vesmírný robot". Nyní mechanické opice absolvují testy chůze a rovnováhy v podmínkách blízkých reliéfu Měsíce.

Studium nebezpečných lunárních povrchů vyžaduje použití různých forem pohybu a výzkumníci z DFKI zkoumají své schopnosti (včetně kombinace nohou, kol a housenek). Opičí roboty mají určité výhody ve srovnání s kolovou, čtyřbodovou opěrkou, která vám umožní vytvořit stabilnější polohu při lezení přes překážky nebo kopcovitý terén. Robot může na svých zadních nohách vyrovnat uvolnění předních končetin, aby provedli jakoukoli akci.

S novými mezinárodními zájmy v lunární misi existuje možnost, že iStruct (nebo jeden z jeho potomků) bude moci navštívit Měsíc. Kolonizace Měsíce pomocí robotů začne vývojem, který se může vyvíjet a rozumně reagovat v jakékoliv současné situaci. V tomto ohledu je cílem projektu vybudovat "pokročilou umělou inteligenci" a robotický systém, který se může učit a pohybovat se kolem.
Robot má kloubový páteř, který spojuje kufr a pánvi, což mu dává větší flexibilitu, stejně jako snímač zatížení nohy a kotníku, který reaguje při kontaktu se zemí.
Mezi další funkce patří:
- 43 nezávislých motorů;
- Šest dalších snímačů FSR na otevřených částech sloužících k detekci překážek;
- 6-osý snímač točivého momentu;
- Digitální tříosý akcelerometr, který vnímá orientaci nohy v prostoru;
- Dva teplotní čidla pro kompenzaci teplotních změn v elektronice;
- Digitální magnetický snímač pro úhlové ovládání každé pohyblivé osy chodidla a kotníku;
Většina robotů již obsahuje mnoho z těchto senzorů, ale kloubová páteř iStruct (která může fungovat jako šestiosový převodník točivého momentu) je druh raritou pro pohybové roboty, který pomáhá při pohybu na všech čtyřech. Senzory v kloubech nohou a kotníku umožňují udržet rovnováhu na nakloněném povrchu.
V letech 2008 a 2009 pracoval na podobném robotovi absolventský inženýr Daniel Kuhn. Malá opice, která byla schopná jednoduše čtyřnohé chůze. Po tomto projektu začal pracovat na iStruct, který má řadu významných aktualizací. Jedná se o mnohem větší váhu, 18 kg (40 liber) a rozměry 66 x 43 x 75 cm (26 x 17 x 29 palců), a také obsahuje 26 stupňů volnosti a poháněný různými elektromotory. Projekt by měl být dokončen v srpnu letošního roku.
Můžete vidět, jak používá jeho intelektuální nohy a kotníky při chůzi a zachování rovnováhy ve videu níže. Jedná se o malý krok pro opičího robota, ale potenciálně obrovský skok pro všechny robotiky podobného designu.
Chůze
Vyvažování
Fotogalerie Celkem 14 obrázků